Достижение гибких и скоординированных движений всего тела остаётся серьёзной проблемой для человекообразных роботов из-за несоответствия динамики между симуляцией и реальным миром. Между тем, именно человекообразные роботы обладают максимальным потенциалом для интеграции в человеческую цивилизацию благодаря сходству их тел с человеческими. Существующие подходы к обучению роботов движениям людей медленные и неэффективные. Но решение есть.
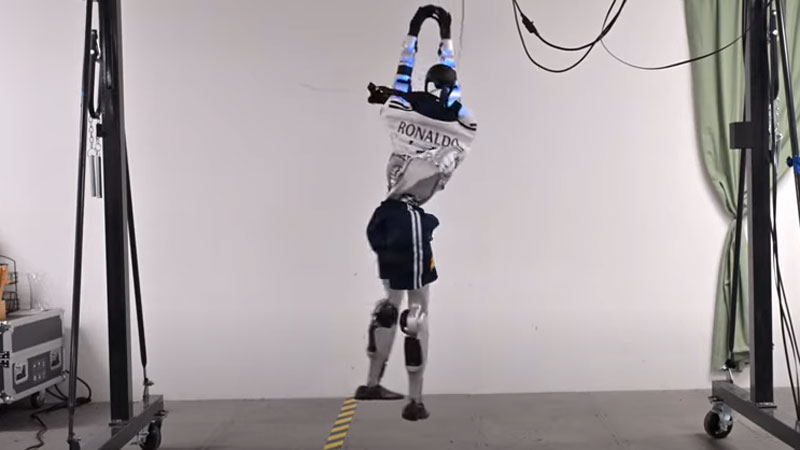
Робот повторяет «прыжок Роналду». Источник изображения: Carnegie Mellon University
Перспективную технологию для уменьшения неуклюжести роботов представили исследователи из Nvidia и Университета Карнеги – Меллона (Carnegie Mellon University). Технология ASAP (Aligning Simulation and Real Physics), предназначенная для совмещения моделирования и физики реального мира, оказалась достаточно эффективной для снижения несоответствий в движениях роботов.
Технология ASAP работает в два этапа. На первом этапе модель поведения обучается на основе видеозаписей с участием настоящих спортсменов — футболистов, баскетболистов, бейсболистов и других, например, с участием Криштиану Роналду. На втором этапе роботы повторяют движение на основе симуляции, а датчики фиксируют происходящее. Затем осуществляется сопоставление симуляции и её отработки роботами в реальном мире. Всё это сводится к более тонкой настройке симуляции, что позволяет в конечном итоге упростить обучение роботов изящным движениям в физическом мире.
По оценкам исследователей, технология ASAP позволяет примерно вдвое снизить частоту появления ошибок при обучении роботов движениям людей. Полная статья о работе размещена на сайте ArXiv и свободно доступна по ссылке.