⇡#Проблемы безопасности интеллектуальных счётчиков
В последние годы во многих странах мира в жилых зданиях внедряют так называемые интеллектуальные счётчики. Они отличаются от традиционных счётчиков расширенными возможностями, например позволяют вести учёт времени потребления ресурсов, а также зачастую оснащаются коммуникационными средствами для автоматической передачи показателей по сети. Системы Automative Smart Metering System активно развиваются в таких странах, как Германия, Италия, США, Канада, Австралия, и многих других.
Что касается нас, то распространению в российских домах интеллектуальных счётчиков способствует принятый в 2009 году Федеральный закон «Об энергосбережении и о повышении энергетической эффективности и о внесении изменений в отдельные законодательные акты Российской Федерации», а также различные федеральные программы по установке этих устройств. В связи с этим мы не могли обойти вниманием недавнее исследование ученых из Университета Южной Каролины, Университета Рутжерса (Rutgers University), а также компании Applied Communication Sciences. Ведь в публикации под названием Neighborhood Watch: Security and Privacy Analysis of Automatic Meter Reading Systems речь идёт о проблемах информационной безопасности интеллектуальных систем учёта.
Ранее уже были опубликованы работы, в которых затрагивались вопросы безопасности AMR-систем. Но затрагивались поверхностно. Американские исследователи детально изучили безопасность таких систем и впервые попытались ответить на два основных вопроса: легко ли провести реверс-инжиниринг коммуникационных протоколов, используемых в AMR, а также возможны ли атаки типа «маскарад» (spoofing).
Для исследований были взяты типичные интеллектуальные счётчики, которые можно найти в американских домах, карманные считыватели показаний счётчиков, используемые инспекторами, которые позволяют определить ID устройства учёта, его тип, показания, возможное физическое вмешательство в его работу, а также инструмент обработки сигналов Universal Software Radio Peripheral (USRP), используемый для захвата сигналов с AMR-счётчика.
После разработки методики перехвата пакета исследователи перешли к декодированию пакетов данных. Для преобразования сигналов в потоки битов и осмысленные поля были определены схема модуляции, скорость передачи данных, схема кодирования, формат пакетов. Затем ученые определили параметры радиоканалов, используемых для передачи. В результате этого этапа работы был создан декодер, который следит за активностью в канале и мгновенно подаёт на выход системы ID-номер счётчика и его показатели (рис. 1).
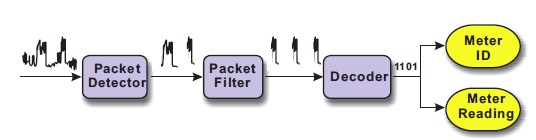
Рис. 1. Потоковая схема декодера
Что интересно, проведение реверс-инжиниринга потребовало минимум денежных затрат. Карманный считыватель и USRP стоят вместе около $1 000. Как было показано, никаких алгоритмов шифрования в счётчиках не используется, что позволяет любому желающему «прослушивать» данные. Злоумышленники могут удалённо контролировать, есть ли кто в квартире, путём съёма информации об уровне энергопотребления счётчика. Также возможна атака, приводящая к разряду аккумулятора счётчика. При получении сигнала активации он сразу же передаёт пакет, поэтому при непрерывной подаче множества таких сигналов счётчик может быстро разрядиться.
Большинство пользователей верят в целостность данных, собранных со счётчиков, и их точность, так как использование AMR снижает влияние человеческого фактора. Но атака типа «маскарад» нарушает эту целостность. Ведь злоумышленник может перехватить данные, подставить фальсифицированные и отправить их на прибор инспектора. И учёные показали возможность такой атаки. Как оказалось, в системах интеллектуального учёта не предусмотрена аутентификация. Кроме того, проверка на входе также отсутствует. При получении нескольких пакетов с одинаковым ID и разными показателями счётчика считыватель просто принимает пакет с самым сильным сигналом и не фиксирует никаких подозрительных действий. При использовании более современной модели считывателя, который производит такую проверку, ученые установили возможность легко блокировать пакеты с легитимного счётчика и заставить считыватель принимать пакеты с подставного устройства.
Также поднимается проблема приватности, ведь интеллектуальные счётчики передают данные о показателях в открытом виде. Исследователи показали, как злоумышленник может одновременно следить за большим количеством домов (рис. 2). В сельской местности радиус обнаружения и декодирования пакетов со счётчика электричества с использованием USRP составил 150 метров, в городе — около 70 метров. Для увеличения радиуса действия USRP к антенне был добавлен усилитель с низким уровнем шума (LNA, low noise amplifier). Это позволило «прослушивать» счётчик на расстоянии до 300 метров (в городских условиях). Газовый счётчик определялся с расстояния всего от 15 до 70 метров, так как он питается от аккумулятора и передаёт сигналы малой мощности.
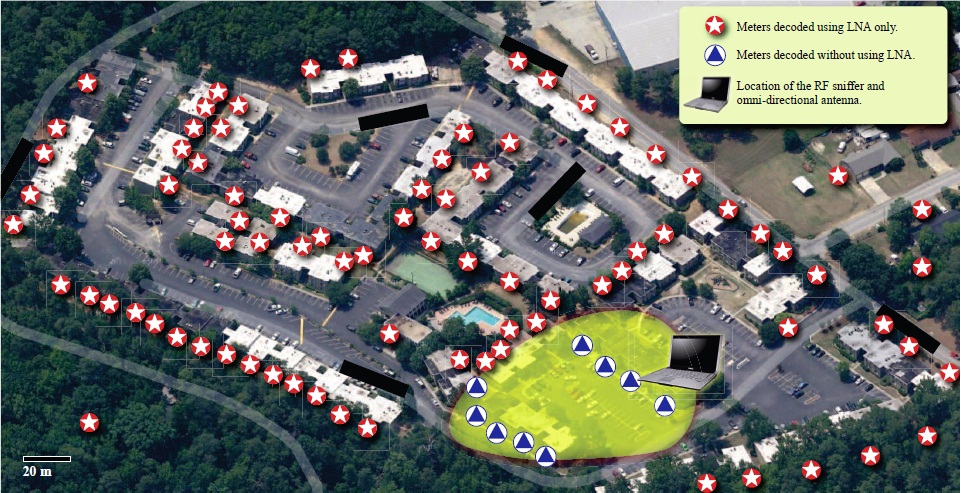
Рис. 2. Схема местности, на которой проводились исследования
Несанкционированное удалённое считывание данных со счётчиков может использоваться в криминальных целях. Например, злоумышленники могут вычислять, хозяева каких домов отправились в отпуск.
⇡#Язык обучения роботов для биологов
Роботизированные устройства активно используются в биологических лабораториях и фармацевтической отрасли. Такие роботы позволяют повысить производительность труда, проводить эксперименты с большей точностью благодаря исключению человеческого фактора, снизить затраты. Но обучение робота — процесс довольно сложный. Биологам приходится задействовать профессиональных программистов, которые плохо разбираются в тонкостях науки, и результат часто является неудовлетворительным. Кроме того, протоколы, разработанные для одной платформы, не подходят для другой. Это препятствует обмену накопленными программными наработками между лабораториями, или даже между роботами в пределах одной лаборатории.
В отрасли появилась необходимость создания высокоуровневого языка программирования роботов, который был бы понятен биологам и при этом отличался бы кросс-платформенностью. За эту задачу взялись ученые-биологи из Национальной лаборатории Лоренса Беркли (Lawrence Berkeley National Laboratory), которые изобрели язык программирования PaR-PaR (Programming a Robot).
Синтаксис и компилятор PaR-PaR строятся на основных принципах компьютерных наук с использованием глубоких познаний в области биологических процессов. Язык использует объектно-ориентированный подход, представляющий в виде виртуальных объектов реагенты, расходные материалы, различные лабораторные устройства. Каждый объект имеет свойства, такие как имя и физическое расположение. Несколько объектов могут группироваться для создания нового составного объекта с собственными свойствами. Над каждым объектом могут выполняться действия, последовательности которых составляют протокол. С использованием протокола можно формировать команды. Пользователь составляет PaR-PaR-скрипт, который далее обрабатывается парсером и сохраняется в базе данных. Команды высокого уровня транслируются в исполняемый код, специфичный для конкретной платформы. Как утверждают разработчики, после минимальной подготовки биолог сможет написать сложные протоколы для робота всего за один час. Структура системы PaR-PaR изображена на рис. 3.
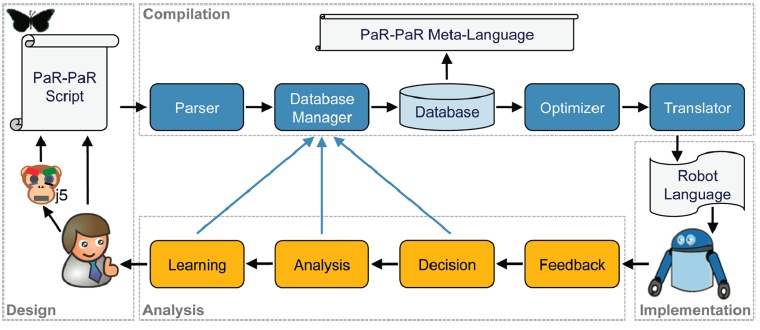
Рис. 3. Модули PaR-PaR и потоки данных
На вход компилятора поступают скрипт PaR-PaR и файл конфигурации рабочего стола. На выходе пользователь получает файл в формате низкоуровневого кода. Этот выходной файл отправляется в стандартную программу с графическим интерфейсом, например в Tecan Freedom EVOware. Исследователь размещает все виртуальные реагенты и оборудование на рабочем столе и запускает эксперимент. Схема работы PaR-PaR приведена на рис. 4.
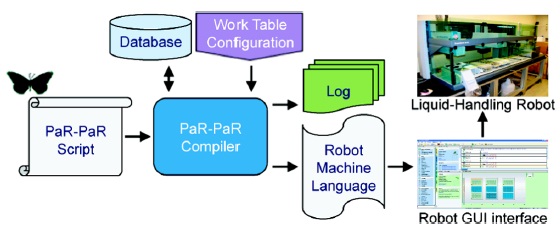
Рис. 4. Схема работы PaR-PaR
Ученые разместили свою разработку в свободном доступе. Результаты работы опубликованы в статье PaR-PaR Laboratory Automation Platform в последнем выпуске журнала Synthetic Biology.
Ученые из Принстонского университета и Института квантовых соединений (Joint Quantum Institute) заявили о разработке так называемой «квантовой шины» (quantum bus), которая, по их мнению, является важным шагом на пути к практической реализации квантового компьютера. С помощью квантовой шины можно будет организовать сложные вычисления на квантовых процессорах.
Кубиты, в отличие от классических битов, могут быть одновременно в состояниях 0 и 1. Такое их свойство, называемое суперпозицией, даёт им преимущества перед традиционными компьютерами в некоторых типах вычислений. Но эти квантовые состояния очень хрупкие, что делает сложным выполнение таких базовых операций, как коммуникация кубитов между собой (квантовая связь).
Для организации подобной связи необходимо передать информацию с одного кубита на другой. Для этого существуют два ключевых способа. Первый использует эффект спин-орбитального взаимодействия, то есть зависимость спина электрона от его движения. Второй подход основан на квантовой электродинамике цепей (cQED, circuit quantum electrodynamics), которая основывается на известных законах атомной физики и квантовой оптики.
Квантовая электродинамика цепей позволяет пространственно разделённым сверхпроводимым кубитам взаимодействовать через сверхпроводимый СВЧ-резонатор, который обеспечивает запутывание кубитов и реализацию простых квантовых алгоритмов. В своей работе ученые объединили архитектуру cQED с эффектом спин-орбитального взаимодействия путём соединения нанонити из арсенида индия, включающей двойную квантовую точку, со сверхпроводящим резонатором. Эту гибридную систему они назвали квантовой шиной (рис. 5).
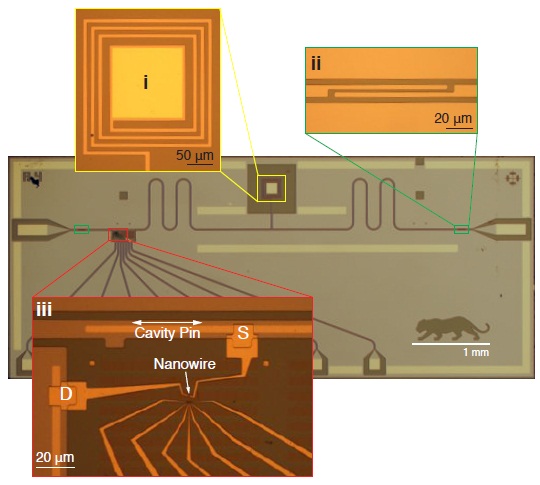
Рис. 5. Схема гибридной системы
Спин-орбитальные кубиты представляют собой пару индиево-арсенидных квантовых точек, которые были созданы для обеспечения сильной квантовой связи между спинами электронов, пойманных в квантовой точке. Это, в свою очередь, позволяет связать магнитное поле кубита с полем СВЧ-фотона, путешествующего через сверхпроводящий резонатор. Предложенная структура квантовой шины позволяет передавать информацию про спины кубитов СВЧ-резонатору, который затем может направить её другому кубиту.
Кроме того, сильная спин-орбитальная связь позволяет управлять вращениями спинов электрически с помощью локального электрода затвора, а связь заряд-резонатор обеспечивает возможность измерения динамики спина. Результаты работы также показывают, как квантовая шина может использоваться для высокочувствительного исследования физики одиночного спина и стойкого связывания спинов через сверхпроводящие СВЧ-резонаторы.
Детальнее об исследовании можно прочесть в публикации Circuit quantum electrodynamics with a spin qubit.
Сегодняшний выпуск хотелось бы завершить заметкой об уникальном роботе, умеющем перемещаться вдоль натянутого каната толщиной всего 4 мм. Это изобретение принадлежит известному в своих кругах японскому роботостроителю Масахико Ямагучи (Masahiko Yamaguchi).
Робот Primer-V4 спроектирован на основе комплекта Kondo KHR-3HV. Он «скользит» вдоль каната, удерживая при этом равновесие с помощью рук. Ямагучи модифицировал ступни ног робота, чтобы обеспечить лучшее сцепление с канатом, а также заменил стандартные руки такими, которые имеют несколько сервоприводов для обеспечения лучшей балансировки. Предлагаем вам впечатляющую видеодемонстрацию робота-канатоходца.
Робот-канатоходец в действии
Отметим, что Ямагучи является также создателем роботов, умеющих кататься на велосипеде и ходить на ходулях.