






 MWC 2018
MWC 2018 2018
2018 Computex
ComputexРобототехники из Йельского университета разработали технологию, которая позволит мягким роботам в случае необходимости отбрасывать или наращивать конечности. Результаты проделанной работы они продемонстрировали в коротких видео.
Источник изображения: The Faboratory at Yale University / YouTube
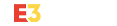
В одном из опубликованных роликов можно видеть, как мягкий четвероногий робот перемещается по горизонтальной поверхности и в какой-то момент на одну из его конечностей падает камень. Реверсивные шарниры, которые используются для крепления конечностей были нагреты под воздействием тока, благодаря чему робот смог попросту отбросить конечность, подобно тому, как отбрасывает хвост ящерица, и продолжить движение. Хотя на видео этого не показано, аналогичным образом конечность может быть присоединена обратно.
Во втором видео мягкий робот не может переместиться с одного стола на другой, поскольку между ними есть небольшой зазор. На помощь ему приходят ещё два таких же робота, которые присоединяются к первому, делая всю конструкцию значительно более длинной. После этого три объединённых робота без труда переместились с одного стола на другой.
Такие возможности не являются чем-то инновационным в мире робототехники, особенно модульной. Однако в существующих системах обычно используются механические соединения и магниты, что делает их жёсткими. Инновационными здесь стали суставы роботов, которые созданы с использованием биконтинуальной термопластичной пены, а также липкого полимера. Такой подход за счёт воздействия током позволяет расплавлять и раздвигать соединения, а затем восстанавливать их обратно путём склейки. Исследователи считают, что созданная ими технология может привести к созданию «роботов, способных радикально менять форму за счёт изменения массы посредством автотомии и интерфузии».
Источник:





 Подписаться
Подписаться