






 MWC 2018
MWC 2018 2018
2018 Computex
Computex
⇣ Содержание
|
Опрос
|
реклама
Самое интересное в новостях
Устройства для перемещения в виртуальной реальности
Автор: Константин Афанасьев
Следующая страница →
Про различные устройства виртуальной реальности писали уже не раз - тут и объемные мониторы, и VR-шлемы, и компьютерные перчатки, обеспечивающие обратную связь между виртуальными объектами и рукой пользователя. Но это все устройства в большинстве своем компактные и предназначенные, так сказать, для сидячей работы в виртуальном пространстве. А вот об устройствах для виртуального передвижения практически ничего не пишут. Между тем, перемещение в виртуальном пространстве происходит отнюдь неестественным для человека образом - с помощью руки, управляющей мышкой или клавиатурой. Намного лучше было бы ходить своими ногами. Думаете, это невозможно? Как бы не так! Называется такая штука Locomotion Interface (то бишь, двигательный интерфейс), а разработки на эту тематику ведутся уже не один год. Об одном подобном устройстве вскоре после последнего SigGraph'а много писали в новостях- это виртуальный пол CirculaFloor, разработанный в лаборатории виртуальной реальности университета Цукуба (Tsukuba University VRLab). Устройство состоит из четырех плиток, которые могут перемещаться друг относительно друга. Движение стоящего на плитках человека отслеживаются сенсорами, и каждый раз под его ногу подъезжает новая плитка. Одновременно с этим та плитка, на которой человек уже стоял и с которой он делает шаг, отъезжает назад. Получается эдакая ходьба на месте, скорость и направление которой можно легко связать с передвижением пользователя в виртуальном пространстве. Сами плитки имеют размер 568x568x92 мм, весят 16 кг и могут перемещаться со скоростью до 120 сантиметров в секунду. На самом деле это даже совсем не плитки, а мобильные роботы Vmax Carrier, разработанные совсем другой японской лабораторией для других целей. Впрочем, они очень даже подошли для использования в CirculaFloor. Управляет движением роботов-плиток компьютер, который анализирует движения человека и взаимное расположение всех плиток на полу. При этом пользователь отслеживается лазерным дальномером, а положение плиток - ультразвуковыми сенсорами. CirculaFloor был успешно продемонстрирован на выставке Siggraph 2004. Ходить по нему вполне можно, только пока очень медленно. Не знаю, удастся ли японцам довести свою разработку до ума - уж очень много в ней движущихся частей.  Система виртуального движения CurculaFloor 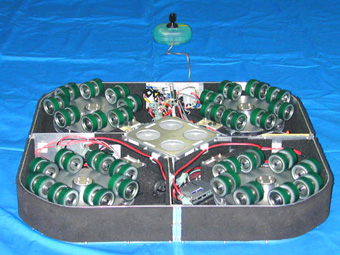 А так выглядят роботы-плитки Vmax Carrier Но на самом деле работа по созданию подобных устройств для передвижения в виртуальности идет уже давно. Например, несколько американских фирм - в частности, Virtual Space Devices, CGSD и Sarcos Research Corporation - еще в 1996-1998 годах занимались разработкой всенаправленных бегущих дорожек (omni-directional treadmill). Понятно, что обычная бегущая дорожка позволяет двигаться в одну сторону и используется, скажем, для тренировок в закрытых помещениях. Всенаправленная дорожка может двигаться в любом направлении и позволяет свободно перемещаться в виртуальном пространстве, обеспечивая при этом нормальную нагрузку на ноги и все сопутствующие ощущения. Надо сказать, что устройство это довольно хитрое - дорожка Virtual Space Devices, например, состояла из 3400 стальных роликов, объединенных в два замкнутых перпендикулярных кольца. Каждое кольцо приводилось в движение мотором, причем скорость движения оценивалась исходя из перемещения пользователя. Верхний слой роликов, по которому, собственно, и шел человек, двигался как единое целое в одну сторону, и мог вращаться в перпендикулярном направлении (его приводил в движение нижний слой роликов). В результате по этой бегущей дорожке можно было идти в любую сторону (со скоростью до 3 метров в секунду), а соответствующий виртуальный пейзаж выводился на четыре проекционных дисплея вокруг установки. Принимавшие разработку военные чины устройство похвалили (а разрабатывалось оно, как и аналоги от CGSD и Sarcos, именно для военных), после чего информация о нем больше не появлялась.
⇣ Содержание
Если Вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Материалы по теме
|
© 1997—2025 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews. kz
![]()
![]()






 Подписаться
Подписаться