|
Опрос
|
реклама
Быстрый переход
Сорняки на полях теперь буквально выжигают лазером — при чём здесь Nvidia?
29.08.2025 [00:54],
Анжелла Марина
Компании Nvidia и Carbon Robotics объединили усилия для борьбы с одной из самых назойливых проблем в сельском хозяйстве — сорняками. Результатом их сотрудничества стало создание машины LaserWeeder G2 шириной около шести метров, работающей на базе двух дюжин графических процессоров Nvidia. 
Источник изображений: techspot.com Агрегат, буксируемый трактором по полям, использует вычислительную мощность 24 графических процессоров в сочетании с 36 высокоточными камерами для идентификации и мгновенного уничтожения сорняков при помощи 24 лазерных диодов мощностью 240 Вт каждый. Это позволяет сжигать до 10 000 сорняков в минуту, или около 600 000 в час, без применения химических гербицидов. Технология уже доказала свою эффективность на сотнях ферм: с 2018 года аграриям в 14 странах было поставлено более 150 единиц техники. Система способна обрабатывать от 0,6 до 1,2 гектара (1,5–3 акра) в час с точностью менее одного миллиметра, превосходя по производительности ручную бригаду из 75 человек. При правильной эксплуатации, как пишет TechSpot, робот уничтожает до 99 % сорняков на обрабатываемом участке.  Подчёркивается, что одним из ключевых преимуществ технологии является невозможность выработки устойчивости у сорняков к лазерному воздействию, в отличие от традиционных гербицидов. Устройство весит около 3265 килограммов и требует для буксировки трактор мощностью не менее 145 лошадиных сил. Каждая поставленная система оснащается годовой гарантией, круглосуточной программной поддержкой и возможностью удалённого сопровождения. Расширенные пакеты сервиса доступны за дополнительную плату. Помимо борьбы с сорняками, Carbon Robotics работает и над решением проблемы нехватки рабочей силы в сельском хозяйстве. По данным компании, более 25 % продуктовых культур в США остаются несобранными из-за дефицита работников. В этой связи разрабатывается система AutoTractor, представляющая собой автономный комплект дооснащения для существующей сельхозтехники, позволяющий машинам работать в режиме 24/7 с возможностью удалённого мониторинга и управления. «Яндекс Роботикс» и «Яндекс Лавка» запустили первый роботизированный даркстор в Москве
07.08.2025 [22:50],
Владимир Мироненко
«Яндекс Роботикс» и «Яндекс Лавка» запустили первый роботизированный даркстор (локальный склад для товаров) в Москве, сообщает ТАСС со ссылкой на информацию «Яндекса». 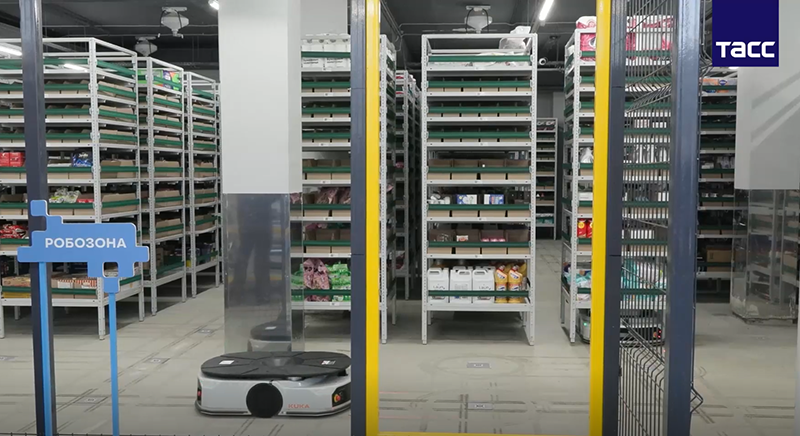
Источник изображения: ТАСС В так называемой «робозоне», занимающей 28 % площади складского помещения, разместили 84 стеллажа и 12 автономных мобильных роботов (AMR). Один и тот же товар может быть размещён на нескольких стеллажах в разных сочетаниях, что позволяет хранить на той же площади на 15 % больше товаров, сообщили в «Яндекс Роботикс». Работу мобильных роботов координирует система управления роботами Yandex RMS, разработанная «Яндекс Роботикс». «Роботы доставляют стеллажи с нужными товарами к сотрудникам. Это позволяет ускорить процесс комплектации заказов более чем на 30 % во всём дарксторе и снижает физическую нагрузку на сотрудников», — рассказали в компании. После оформления клиентом заказа система управления складом (WMS, Warehouse Management System) «Яндекс Лавки» анализирует его и распределяет задачи. Сборку скоропортящихся и замороженных продуктов выполняют сотрудники. Если в заказе есть снеки, сладости и другие товары длительного хранения, WMS передаёт задачу в систему Yandex RMS, которая предложит оптимальный маршрут и направит AMR к нужным стеллажам. Ежедневно мобильные роботы обрабатывают около 40 % ассортимента «Яндекс Лавки». К середине 2026 года компания планирует запуск ещё пяти автоматизированных дарксторов в Москве и Санкт-Петербурге. В дальнейшем часть новых дарксторов «Яндекс Лавки» сразу получит «робозоны». В MIT создали робота-лаборанта с навыками эксперта в материаловедении
09.07.2025 [21:34],
Геннадий Детинич
В процессе поиска новых материалов для определённых задач приходится производить множество замеров. Автоматизация этого процесса значительно ускорила бы исследования, а внедрение ИИ помогло бы с выбором наилучших точек измерения. Всё вместе обещает привести к созданию полностью автоматических лабораторий любого профиля. В Массачусетском технологическом институте сделали выбор в пользу исследования материалов для солнечных панелей. 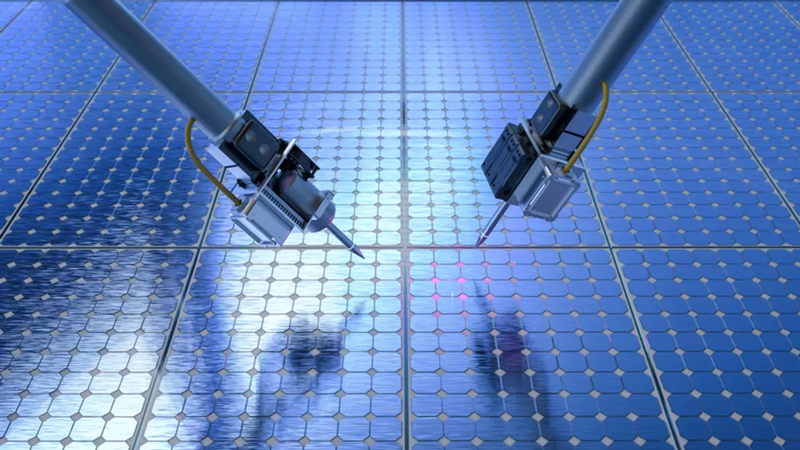
Источник изображения: MIT При исследовании образцов новых светочувствительных материалов приходится вручную выполнять множество замеров фотопроводимости. Все образцы различаются и редко имеют одинаковую форму. Дополнительные трудности создаёт неоднородность материалов — её необходимо распознать и выбрать правильное место для измерения. Казалось бы, можно воспользоваться машинным зрением, но некоторые характеристики невозможно определить бесконтактным способом. Необходим физический контакт, который отнимает у исследователей массу времени и сил. Решить эту давнюю проблему — преодолеть медленную скорость ручного измерения ключевых свойств новых материалов, что, в частности, ограничивает прогресс в такой перспективной области, как солнечная энергетика, — взялась группа учёных из MIT. В основе созданной ими автоматической системы лежит роботизированный зонд, способный измерять фотопроводимость — свойство, показывающее, как материал реагирует на свет. Благодаря интеграции экспертных знаний материаловедов в модель машинного обучения робот научился определять наиболее информативные точки на образце для проведения измерений. Такой подход в сочетании со специализированным алгоритмом планирования позволяет роботу быстро и эффективно перемещаться между точками замера. «Я нахожу эту работу невероятно интересной, поскольку она открывает путь к автономным методам измерения характеристик, основанным на контакте, — сказал Тонио Буонассиси (Tonio Buonassisi), профессор и старший автор исследования. — Не все важные свойства материала можно измерить бесконтактно. Если необходимо установить контакт с образцом, вы хотите сделать это быстро и получить максимальный объём информации». Разработанная платформа начинает работу с получения изображения образца перовскита с помощью встроенной камеры. Затем компьютерное зрение делит изображение на сегменты, которые анализируются с помощью нейросетевой модели, использующей знания химиков и материаловедов. Основываясь на форме и составе образца, нейросеть определяет наилучшие точки для контакта зонда. Эти точки передаются в модуль планирования траектории, который рассчитывает наиболее эффективный маршрут для перемещения зонда. Адаптивность этого подхода имеет решающее значение, поскольку образцы часто имеют уникальную форму. «Это почти то же самое, что измерять снежинки – трудно найти две одинаковые», — отметил Буонассиси. Ключевым нововведением стала самоконтролируемая работа нейросети, которая выбирает оптимальные точки контакта напрямую по изображениям образцов, без использования обучающих данных. Команда также улучшила алгоритм планирования маршрута, добавив элемент случайности, что помогло роботу находить более короткие и эффективные пути. В ходе 24-часового тестирования робот выполнял более 125 уникальных измерений в час, превзойдя по точности и надёжности предыдущие ИИ-методы. Этот скачок в скорости и точности поможет ускорить разработку более эффективных солнечных панелей и других электронных устройств. Количество роботов на российских предприятиях планируется увеличить впятеро к 2030 году
29.05.2025 [10:56],
Владимир Фетисов
Количество роботов на российских предприятиях необходимо увеличить в пять раз к 2030 году. Об этом заявил премьер-министр России Михаил Мишустин во время недавней встречи со студентами технических вузов. 
Источник изображения: Homa Appliances / Unsplash «За шесть лет нам, конечно, предстоит сделать всё необходимое, чтобы примерно в пять раз нарастить количество роботизированных систем на предприятиях. Плотность мы должны довести до 145 единиц на 10 тысяч работников. Много это или мало – уже неплохо, если нам удастся этого добиться», — приводит источник слова господина Мишустина. Он также добавил, что работа в озвученном направлении будет сопровождаться всесторонней государственной поддержкой. Глава правительства напомнил, что по поручению президента РФ Владимира Путина страна должна войти в число 25 ведущих стран по уровню роботизации к 2030 году. По данным премьер-министра, в настоящее время в России на 10 тысяч работников приходится 29 роботов. «Это такой, знаете, сравнительный метод, потому что всё зависит от объёма производства, от спроса и от того, что у конкурентов есть. И четыре года назад параметр не превышал десяти. Идёт мощное развитие <…> Я убеждён, что мы сделаем всё необходимое для того, чтобы Россия стала одной из ведущих стран в производстве роботов», — отметил премьер-министр. Он добавил, что в настоящее время роботизированные системы активно применяются не только в автопроме или металлообработке, но и в авиа- и судостроении, фармацевтике, пищевой индустрии и других отраслях. В качестве примера разработчика роботизированных комплексов господин Мишустин привёл компанию «Яндекс», которая достаточно давно развивает направление создания роботов. В Китае заканчивается дешёвая рабочая сила — проблему решат роботы
14.11.2024 [13:55],
Владимир Мироненко
Китайская промышленность в настоящее время пытается решить одну из самых больших проблем с нехваткой рабочей силы. Около 6 млн производителей столкнулись с тем, что стоимость рабочей силы растёт из-за сокращения населения трудоспособного возраста. На помощь приходят роботы, пишет Financial Times. 
Источник изображения: Zongwei Пекин выбрал роботизацию как способ решения проблемы нехватки рабочей силы, предлагая сектору налоговые льготы и субсидии для поощрения инвестиций в это направление. Однако многое будет зависеть от человеческого фактора — в частности, от того, будут ли работники иметь необходимые навыки для управления сложными машинами, отмечает издание. Во многом благодаря господдержке Китай стал за последнее десятилетие крупнейшим в мире рынком промышленных роботов. По данным Международной федерации робототехники, в прошлом году здесь было установлено более 276 тыс. роботов, что составило более половины от общемирового объёма. Если ранее китайские компании импортировали большую часть роботов, в частности из Японии, Германии и США, то теперь всё чаще устанавливают отечественные устройства, которые гораздо дешевле зарубежных аналогов. Это позволило снизить стоимость интеллектуального производственного оборудования в Китае, но, по словам экспертов, ещё предстоит работа по обучению рабочей силы, которая будет его использовать. Сложное оборудование требует технических знаний, включая инженерные навыки для ремонта и знания ПО, используемого для управления машинами. Промышленность Китая в значительной степени зависит от почти 300 млн рабочих-мигрантов — выходцев из сельских районов, переехавших в урбанизированные прибрежные регионы в поисках более высокооплачиваемой работы. Из них, по состоянию на прошлый год, только у 52 % было среднее образование, а у 14 % — начальное образование. Как утверждают исследователи, мигранты с наибольшей вероятностью будут вытеснены роботами. В то же время в Китае много инженеров, у которых не будет проблем с адаптацией автоматизированных технологий на заводах. В первую очередь роботы используются для выполнения работ, от которых работники большей частью отказываются. Генри Хан (Henry Han), президент ABB Robotics China, сообщил, что роботы «умеют выполнять скучную, грязную и потенциально опасную работу, на которую трудно нанять людей». Провинции со значительными производственными мощностями, в частности Гуандун, запустили программы обучения нового поколения рабочих, но, как выяснилось, из-за отсутствия современного оборудования на этих курсах полагаются на учебники или устаревшие механизмы. По словам исследователей из университетов Цинхуа и Фудань, наиболее эффективное обучение осуществляется поставщиками роботов и интеллектуального производственного оборудования. Например, компания Zongwei направляет команды инженеров для установки оборудования и обучения клиентов использованию ПО, которое управляет заводской линией. Заместитель генерального директора Zongwei Джек Сю (Jack Xu) пояснил, что высокая конкуренция в Китае позволяет клиентам требовать очень практичного послепродажного обслуживания. Это стимулирует создание простых в эксплуатации машин, чтобы избежать расходов на отправку инженеров для обучения. Некоторые крупные компании создали специализированные институты для предоставления официальной сертификации. Например, ABB Robotics China создала учебный институт в Шанхае, где проводится обучение клиентов программированию, а также обслуживанию электрической и механической части оборудования. В Швейцарии придумали роборуку, которая может отсоединяться от манипулятора и самостоятельно ползать
28.09.2024 [16:14],
Владимир Мироненко
Разработчики Федеральной политехнической школы Лозанны (EPFL, Швейцария) представили на Международной конференции по робототехнике и автоматизации (ICRA) шарнирную роботизированную руку, способную расширить радиус действия, отсоединяясь и самостоятельно перемещаясь к предмету, чтобы его взять. 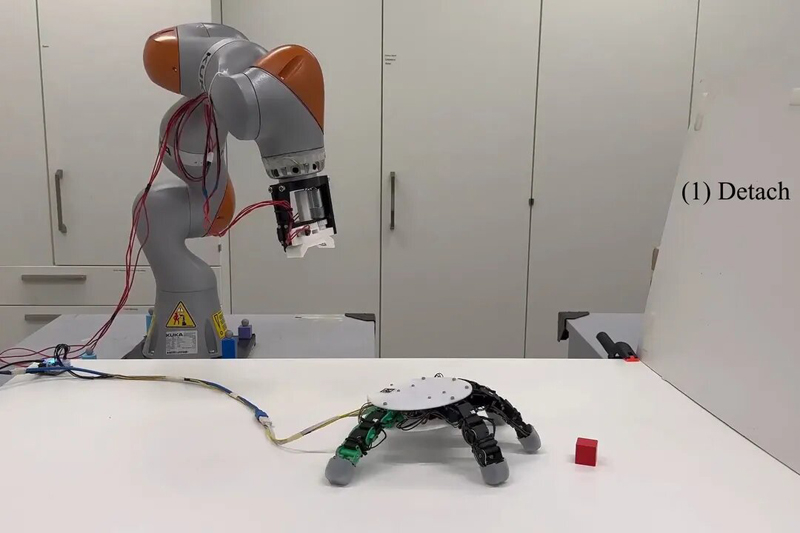
Источник изображения: EPFL Роботизированные руки обычно прикреплены к основанию на полу или другим конструкциям для дополнительной устойчивости, что ограничивает радиус их действия. Целью исследования, проведённого в Лаборатории алгоритмов и систем обучения EPFL (LASA), была разработка бимодальной роботизированной руки с расширенными возможностями захвата, включая периодическую независимость от руки, к которой она прикреплена. Роборуки обычно создаются с одной целью: удерживать и перемещать предметы. Чтобы разработать роботизированную руку, которая могла бы делать это, перемещаясь самостоятельно, исследователи сгенерировали и усовершенствовали базовую конструкцию с помощью генетического алгоритма, который опирается на биологические приёмы, и физического симулятора MuJoCo для проверки дееспособности прототипа. Исследователи определили оптимальное положение и количество необходимых сочленённых пальцев — их оказалось пять, как у человека. Пальцы руки могут сгибаться в двух направлениях, что позволяет ей не только «ползать», но и захватывать два предмета одновременно, будучи прикреплённой к конечности роботизированного манипулятора. Она также может использовать несколько пальцев для подъёма предметов, в то время как остальные функционируют в качестве опоры. Роботизированная рука также имеет магнитный крепление на «запястье». Если добавить такую шарнирную роботизированную руку, например, к роботу Spot, то его можно будет использовать для исследования или анализа областей, которые сейчас недоступны из-за габаритов и ограниченной манёвренности. Dreame выпустила робота-газонокосилку Roboticmower A1 для автоматического ухода за газоном
25.07.2024 [09:13],
Владимир Мироненко
Известный производитель бытовой техники Dreame Technology представил в России роботизированную газонокосилку Roboticmower A1. Компания Dreame хорошо известна выпуском роботов-пылесосов и других устройств для уборки помещений. Презентация газонокосилки Dreame означает расширение её портфолио за счёт устройств для выполнения работ по благоустройству приусадебных территорий.  Робот-газонокосилка Roboticmower A1 представляет собой современное решение для ухода за газоном без вмешательства со стороны пользователя. Roboticmower A1 предназначена для скашивания травы, срезая её при помощи диска с плавающим лезвием на высоте от 3 до 7 см с шириной захвата 22 см. Низкий профиль и маневренные колеса позволяют устройству без труда передвигаться по территории приусадебного участка газона с разной сложностью рельефа и плотной растительностью, включая поверхности с уклоном в 45 % или углом до 24°, скашивая траву даже в труднодоступных местах. Roboticmower A1 оснащена мощным двигателем, обеспечивающим стабильную работу в разных режимах. Электронная регулировка высоты стрижки позволяет точно выставить нужный уровень, обеспечивая равномерное срезание травы и придавая лужайке возле дома аккуратный вид.  Roboticmower A1 оснащена ультрасенсорной системой OmniSense, предоставляющей собой комплексное решение для картографирования, точной локализации и эффективного обхода помех во время стрижки газона устройством. Высокоточный 3D-лидар с радиусом захвата до 70 метров и всенаправленным углом обзора 360 × 59° позволяет составить детальную 3D-карту карту приусадебного участка, на что потребуется всего около 15 минут. Благодаря этому Roboticmower A1 может точно определять своё местоположение и работать в различных условиях — даже в темноё время. Устройство также невосприимчиво к помехам сигнала.  Пользователю также не придётся беспокоиться о том, что газонокосилка повредит его любимые цветы или садовую мебель. Благодаря технологии всенаправленного обхода с использованием датчика препятствий и ИИ-алгоритма Roboticmower A1 распознаёт 11 типов препятствий в пределах установленного радиуса и обходит их, чтобы обеспечить безопасный и контролируемые процесс стрижки газона. При этом можно задавать в настройках приложения Dreamhome App высоту препятствия, которое будет необходимо объезжать газонокосилке. При скашивании травы Roboticmower A1 использует технологию U Path Planning, которая интеллектуально планирует маршруты кошения. При движении по U-образной траектории обеспечивается равномерное точное срезание травы и аккуратный вид участка после завершения процесса. При этом газонокосилка легко преодолевает препятствия высотой до 4 см. Аккумулятор ёмкостью 5000 мА·ч поддерживает автономную работу газонокосилки в течение 50 минут, позволяя срезать за это время траву на участке около 180 м2. При разряде батареи ниже установленного уровня газонокосилка в автоматическом режиме направляется к зарядной док-станции для подзарядки с помощью функции автоматического поиска зарядного устройства, и после зарядки возвращается на участок для продолжения скашивания травы с места, где прекратила работу, обеспечивая непрерывный процесс ухода за газоном без повторов прохода или пропущенных зон. На восполнение заряда батареи уходит около часа. 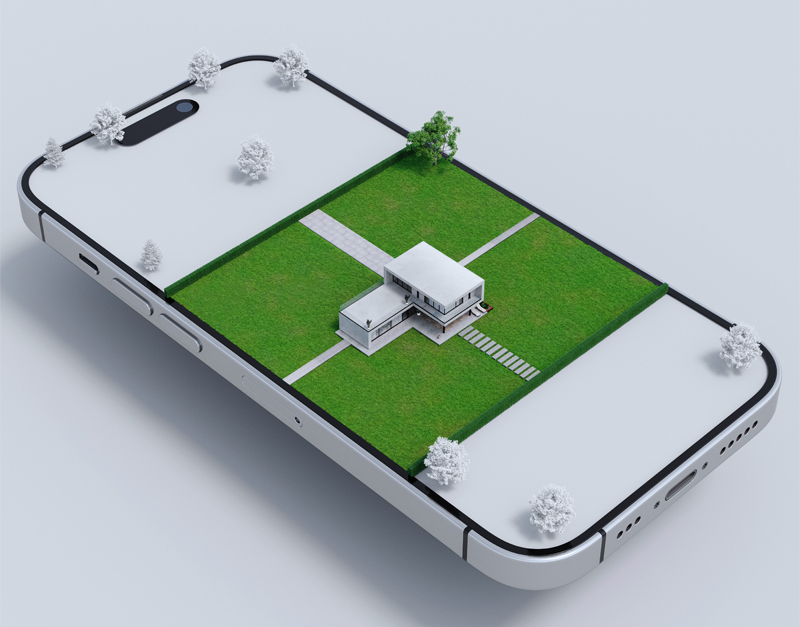 Для управления устройством используется приложение Dreamehome App для смартфонов под управлением ОС Android и iOS, с помощью которого можно указывать на имеющейся 3D-карте зоны, подлежащие обработке в этот раз, а также запретные зоны. Причём можно указывать сразу несколько зон для обработки. Также имеется панель управления с цветным экраном и несколькими кнопками. С помощью приложения можно также редактировать карты, созданные Roboticmower A1, выбирать режимы работы устройства, задавать высоту стрижки травы и другие параметры работы газонокосилки, контролировать процесс стрижки дистанционно, а также устанавливать расписание работ. Roboticmower A1 отличается тихой работой — уровень шума не превышает 64 дБ. Корпус устройства выполнен из пластика. В верхней части корпуса находится клавиша, позволяющая вручную отключить устройство в случае аварийной ситуации. Доступны два варианта цвета корпуса — стальной и чёрный. Газонокосилка оснащена датчиком дождя, который автоматически приостанавливает её работу в случае ухудшения погодных условий. В этом случае газонокосилка направляется к док-станции и возобновляют работу по окончанию дождя. По защите от влаги Roboticmower A1 соответствует стандарту IPX6. Человекоподобный робот HumanPlus научился боксировать и играть на пианино, просто наблюдая за людьми
20.06.2024 [21:47],
Анжелла Марина
Команда учёных из Стэнфордского университета представила нового человекоподобного робота HumanPlus, способного обучаться и точно воспроизводить сложную последовательность движений человека. Робот также может копировать движения в режиме реального времени. 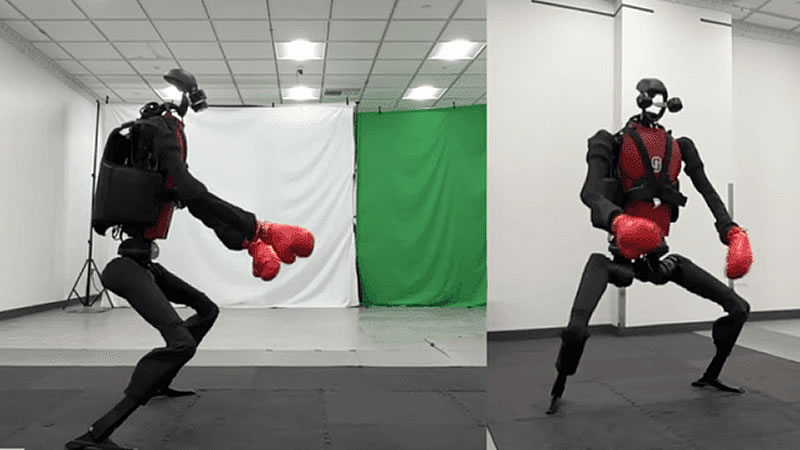
Источник изображения: Zipengfu/X По словам разработчиков, HumanPlus достаточно всего 40 часов видеозаписей с людьми, выполняющими какую-либо задачу, чтобы научиться повторять эти действия самостоятельно. Более того, благодаря встроенной камере, робот может отслеживать перемещения человека в режиме реального времени и тут же имитировать их, сообщает ресурс Interesting Engineering. Конструктивно HumanPlus основан на коммерческом гуманоидном роботе H1 от китайской компании Unitree, однако с совершенно другой программной платформой и некоторыми другими сторонними компонентами. Робот оснащён «руками» производства Inspire-Robots и «запястьями» от другого поставщика. Высота робота составляет 5 футов 9 дюймов (около 175 см). Отличительной чертой HumanPlus является открытый исходный код, то есть любой желающий может модифицировать конструкцию и функциональность робота. Разработчики также опубликовали на GitHub репозиторий с подробной документацией, позволяющей инженерам и энтузиастам создать аналогичную модель самостоятельно. В открытом доступе предоставлена информация о стоимости всех комплектующих, потраченных на создание HumanPlus. Согласно приблизительным подсчётам учёных, общая цена компонентов составила 107 945 долларов. Учитывая широкий набор движений, которыми владеет робот, эта цифра выглядит вполне конкурентоспособной на фоне альтернатив, представленных сегодня на рынке. Интересно, что представление HumanPlus совпало по времени с заявлением Илона Маска (Elon Musk) о том, что к концу года на заводах Tesla будет трудиться уже более 1000 человекоподобных роботов Optimus. Глава компании выразил надежду, что в следующем году Optimus поступят также в широкую продажу, а сама Tesla превратится в 25-триллионный бизнес. Ранее Маск неоднократно подчёркивал, что считает Optimus важнейшим продуктом Tesla в перспективе. Ещё одним знаковым событием в мире гуманоидных роботов стало выступление популярного искусственного интеллекта Софии на церемонии вручения дипломов в колледже в Нью-Йорке. Перед аудиторией из более 2000 выпускников, преподавателей и гостей София произнесла речь, призывающую молодых специалистов использовать технологии во благо и для улучшения жизни людей. Также недавно в TikTok появилось забавное видео с китайской фабрики компании Ex Robots, на которой производят гуманоидных роботов. Изображение ниже демонстрируют цех, в котором одновременно функционирует несколько десятков человекоподобных механизмов. 
Источник изображения: Meimei4515/TikTok Роборуки от MIT помогут астронавтам NASA встать после падения на Луне
17.05.2024 [20:32],
Сергей Сурабекянц
Упавшему астронавту в скафандре не позавидуешь — попытки подняться на Луне или планете с другой гравитацией напоминают о печальной судьбе перевёрнутой на спину черепахи. Поэтому для запланированного возвращения людей на Луну в сентябре 2026 года исследователи Массачусетского технологического института подготовили SuperLimbs — пару роботизированных конечностей, выдвигающихся из скафандра, чтобы помочь астронавту встать обратно на ноги с минимальными усилиями. 
Источник изображений: MIT «Астронавты физически очень развиты, — считает профессор Массачусетского технологического института Гарри Асада (Harry Asada). — Но на Луне гравитация составляет одну шестую от земной при неизменной инерции. Скафандр является значительным бременем и может сковывать движения. Мы хотим предоставить астронавтам безопасный способ встать на ноги в случае падения». На видео ниже неуклюжие попытки астронавта встать вызывают смех, хотя на самом деле смешного в этом мало, а проблема адаптации и уверенного передвижения по поверхности другой планеты достаточно серьёзная. SuperLimbs были разработаны ещё 10 лет назад и с тех пор применяются в судо-, авиастроении и строительстве. В ходе общения с NASA разработчики выяснили, что проблема падения на Луне представляет собой серьёзный риск для астронавтов и внесли некоторые изменения в конструкцию с учётом космической специфики и другого уровня гравитации.  Исследователи провели ряд экспериментов, снабдив группу добровольцев жёсткой, тяжёлой и громоздкой экипировкой и заставив их подниматься с пола всеми возможными способами. Выяснилось, что 80 % людей пытаются подняться, выполняя определённую последовательность действий. Затем был разработан контроллер, который с помощью роботизированной конечности помогал людям вставать, причём со стороны это напоминало действия барона Мюнхгаузена, который сам вытащил себя из болота за волосы. Убедившись, что они на правильном пути, учёные модернизировали систему SuperLimbs, которая получила две многосуставные «руки» по обе стороны рюкзака для скафандра. В рюкзаке также находится система управления и дыхательный аппарат. Теперь устройство может использоваться не только для помощи при падении, но и для повышения производительности за счёт стабилизации положения тела, прогнозирования и предотвращения падений. Использование SuperLimbs также помогает снизить метаболическую активность астронавта, что позволяет экономить кислород и увеличивать автономность. Стоит упомянуть и о не самом типичном применении устройства — переход в «четвероногий режим», в котором астронавт превращается в своего рода лунного кентавра.  В Лаборатории реактивного движения NASA планируют изготовить вариант SuperLimbs из «космических», максимально облегчённых материалов и затем испытать его вместе со скафандром на симуляторах низкой гравитации. Специалисты NASA полагают, что устройство SuperLimbs может помочь астронавту быстрее восстановиться после падений, работать более продуктивно и продлить время нахождения в безвоздушном пространстве. Оригами и нанотехнологии: разработан робот-гусеница, который пролезет в самые труднодоступные места
09.05.2024 [16:05],
Анжелла Марина
Ученые из Принстонского университета разработали модульного гибкого робота, состоящего из цилиндрических сегментов. Робот-гусеница может разделяться на сегменты, собираться вновь, перемещать грузы и ползать по лабиринтам. 
Источник изображения: Princeton University Древнее искусство складывания бумаги, известное как оригами, вдохновило инженеров из университетов Принстона (Princeton University) и Северной Каролины (North Carolina State University) на создание уникального гибкого робота. Объединив оригами с современными технологиями, они разработали модульную конструкцию, способную сгибаться, скручиваться и ползти по сложным лабиринтам. Ранее управление «мягкими» роботами обычно затруднено, так как управляющие механизмы увеличивали жесткость конструкции и ограничивали гибкость. Новая разработка решает эту проблему за счет встраивания системы управления непосредственно в корпус робота. Робот-гусеница состоит из отдельных цилиндрических модулей, выполненных по технологии оригами в форме узора Креслинга (Kresling). Такая конструкция позволяет модулям скручиваться и раскручиваться, обеспечивая способность ползать и маневрировать. При этом модули могут работать как единое целое или независимо друг от друга. Ключевую роль в управлении движениями играет оригинальный электротермический привод на основе нагревательных элементов из серебряных нанопроволок. При подаче электрического тока нагревательные элементы заставляют деформироваться проволоки с разным коэффициентом теплового расширения, что и приводит к сгибанию модулей. Таким образом точно контролируются все движения, свойственные в природе гусенице. Благодаря модульности и гибкости конструкции робот может собираться в цепочки разной длины, а также «протискиваться» в узких пространствах. Данная разработка открывает перспективы для применения таких роботов при поисковых операциях, ремонтных и монтажных работах. В дальнейшем планируется экспериментировать с разными формами модулей, узорами оригами и вариантами соединения для улучшения подвижности и управляемости инновационных мягких роботов. |
© 1997—2025 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews. kz
![]()
![]()







 MWC 2018
MWC 2018 2018
2018 Computex
Computex